2024年9月7日晚19时,厦门大学萨本栋微米纳米科学技术研究院祝青园教授以《无人车辆环境感知高保真仿真模拟与交互研究》为题,通过腾讯会议平台为暑期学校的学员们开展了线上专题讲座。本次讲座由350VIP浦京集团副院长刘新田教授主持。

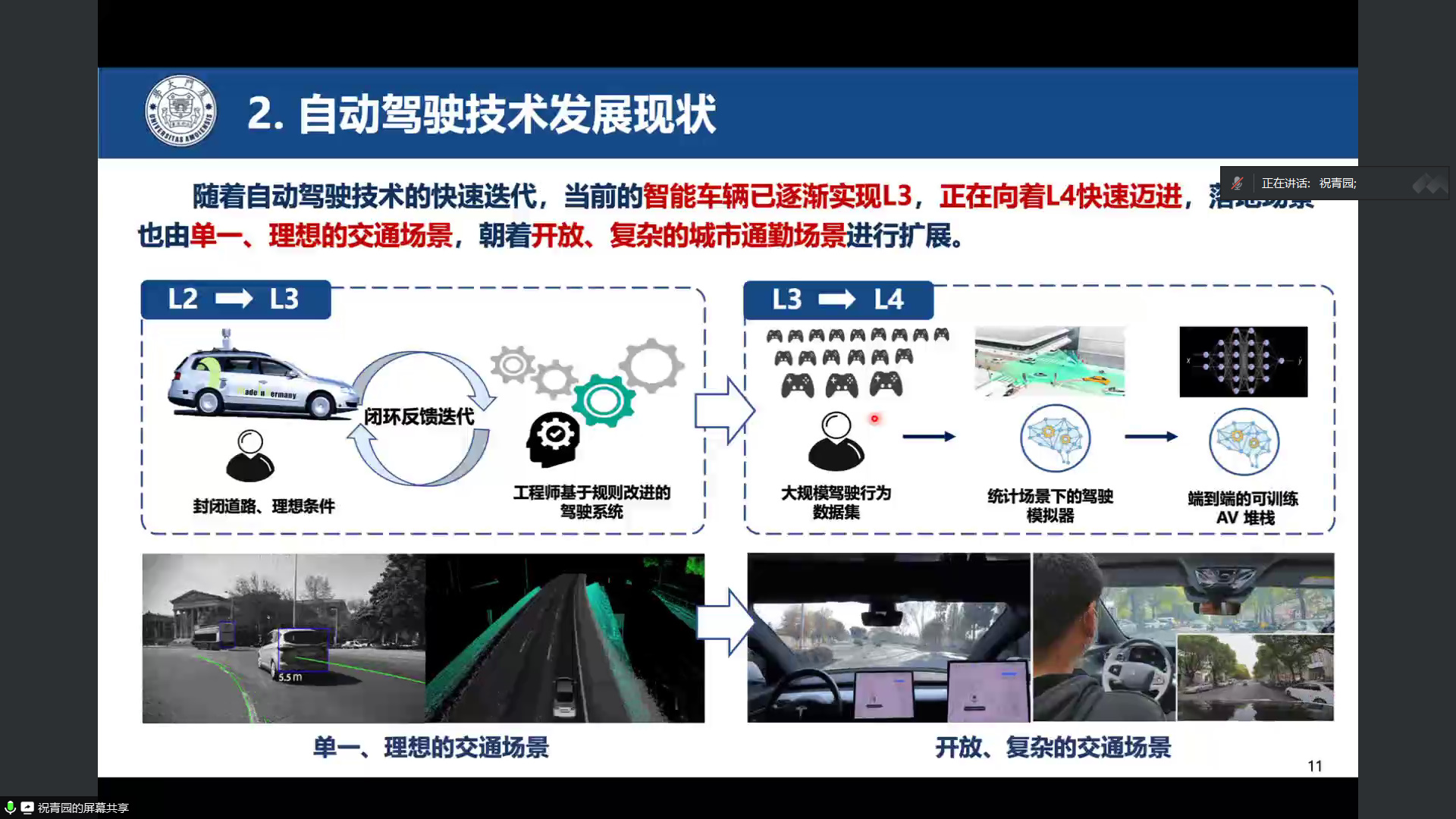
祝教授首先阐述了不同环境、气候和地理条件对自动驾驶系统感知能力的挑战,以及仿真模拟技术在解决这些问题中的重要作用,并提出当前应用于自动驾驶测试的两种主要仿真方案:基于真实数据融合的仿真方案和基于虚拟环境建模的仿真方案。上述两种方法各有优势,但单一使用仍无法完全满足高阶自动驾驶系统开发的需求。为此,祝教授详细讲解了包括激光雷达(LiDAR)、视觉传感器和惯性测量单元(IMU)的仿真。在此过程中,LiDAR作为自动驾驶系统的重要感知设备,能够生成高精度的三维环境信息;视觉传感器则为自动驾驶提供实时的场景感知数据,支持障碍物检测和车道识别等功能;IMU则通过测量旋转和加速度数据,为车辆的姿态和定位提供支持,而高保真的传感器仿真技术则为实现高精度自动驾驶仿真测试奠定了研究基础。最后,祝教授提出了基于上下文聚合网络的航拍建图方法,以解决无人机建图过程中存在的精细化不足问题,使得场景模型能够得到更为精确的重构。
本次讲座内容丰富、逻辑清晰,学员们在互动环节积极提问并就无人车辆环境感知系统的高保真仿真模拟技术展开了热烈讨论,并在如何应对复杂交通场景感知挑战方面获得了新的启发。
专家简介:
祝青园,厦门大学萨本栋微米纳米科学技术研究院教授、博士生导师,机电工程系主任,厦门大学国家级机电类虚拟仿真中心主任,主持国家重点研发项目子课题、多项国家自然科学基金及福建省、厦门市重点项目课题和企业委托项目,发表论文60余篇,相关成果获得福建省科技进步二等奖、厦门市科技进步一等奖等奖励,获得福建省高等教育教学成果奖二等奖、厦门大学高等教育教学成果奖一等奖、厦门大学2017年度我最喜爱的十位老师等荣誉。
